Inverse Design of Discrete Interlocking Materials with Desired Mechanical Behavior
Abstract
We present a computational approach for designing Discrete Interlocking Materials (DIMs) with desired mechanical properties. Unlike conventional elastic materials, DIMs are kinematic materials governed by internal contacts among elements. These contacts induce anisotropic deformation limits that depend on the shape and topology of the elements. To enable gradient-based design optimization of DIMs with desired deformation limits, we introduce an implicit representation of interlocking elements based on unions of tori. Using this low-dimensional representation, we simulate DIMs with smoothly evolving contacts, allowing us to predict changes in deformation limits as a function of shape parameters. With this toolset in hand, we optimize for element shape parameters to design heterogeneous DIMs that best approximate prescribed limits. We demonstrate the effectiveness of our method by designing discrete interlocking materials with diverse limit profiles for in- and out-of-plane deformation and validate our method on fabricated physical prototypes.
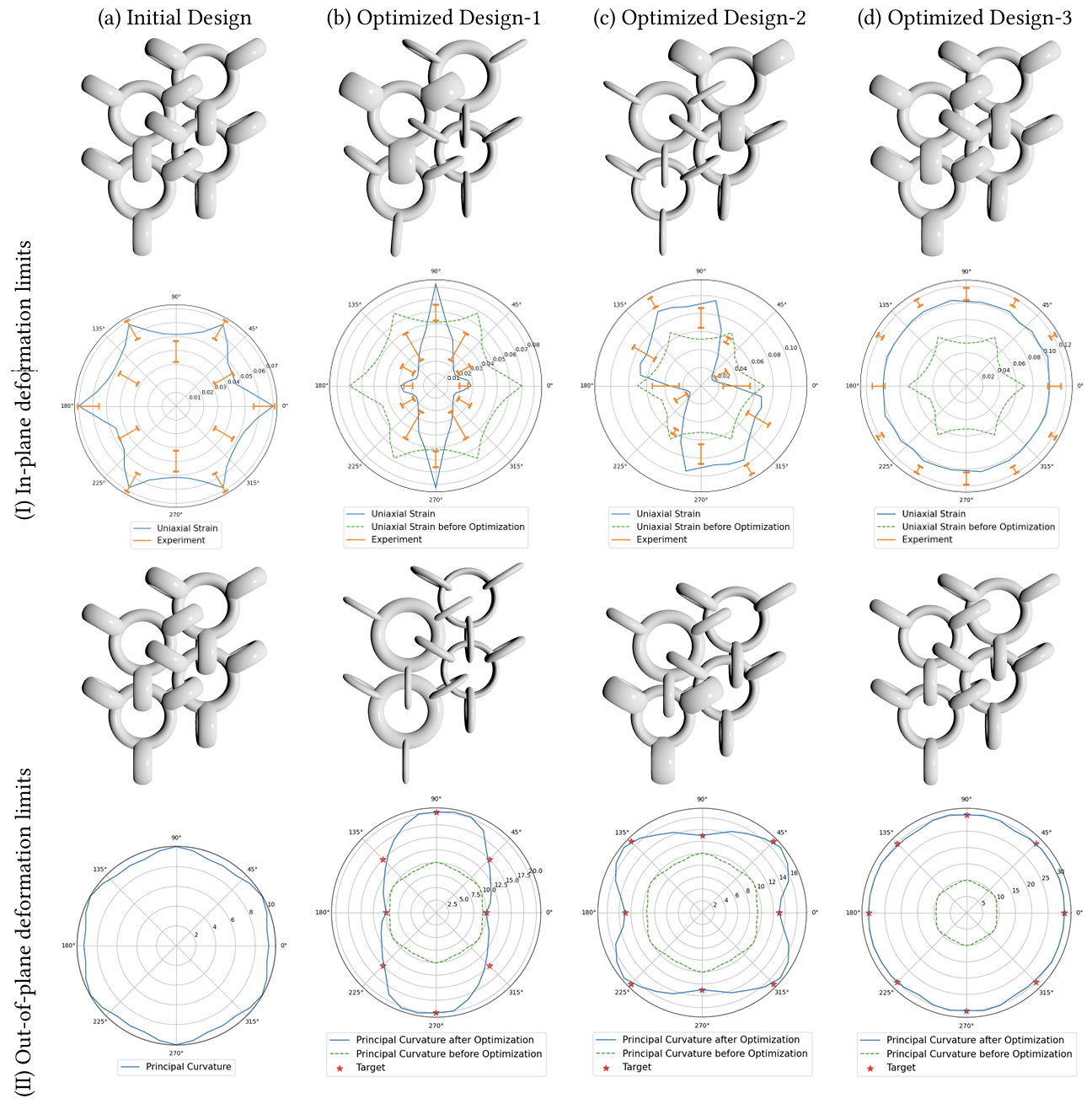
Fig. 5. Threefold symmetric chainmail.
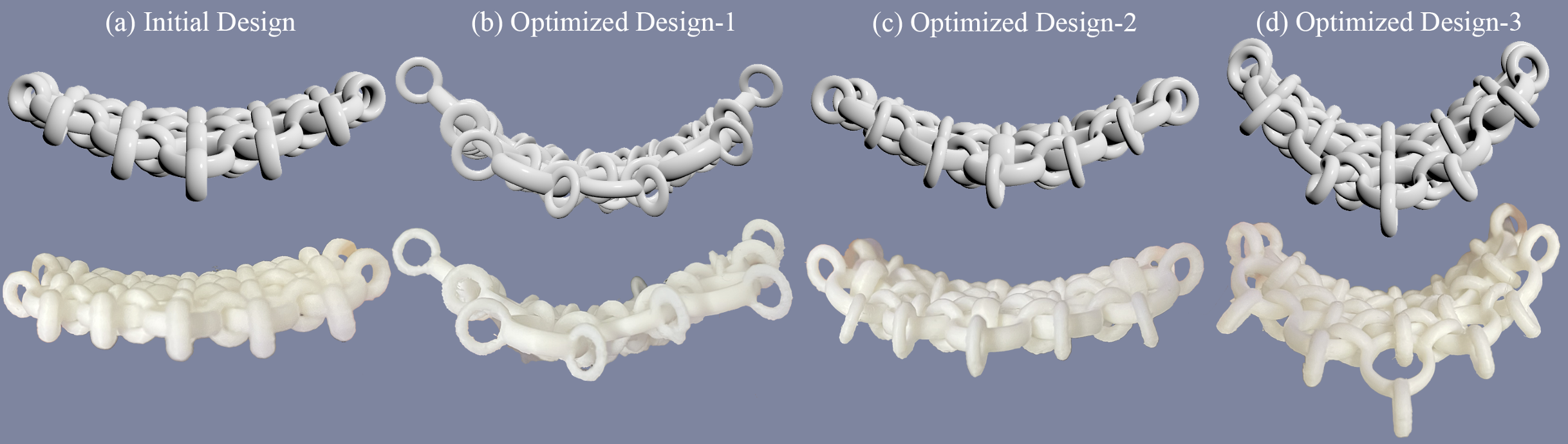
Fig. 6. Comparison of bending behaviors between simulation and physical prototypes.
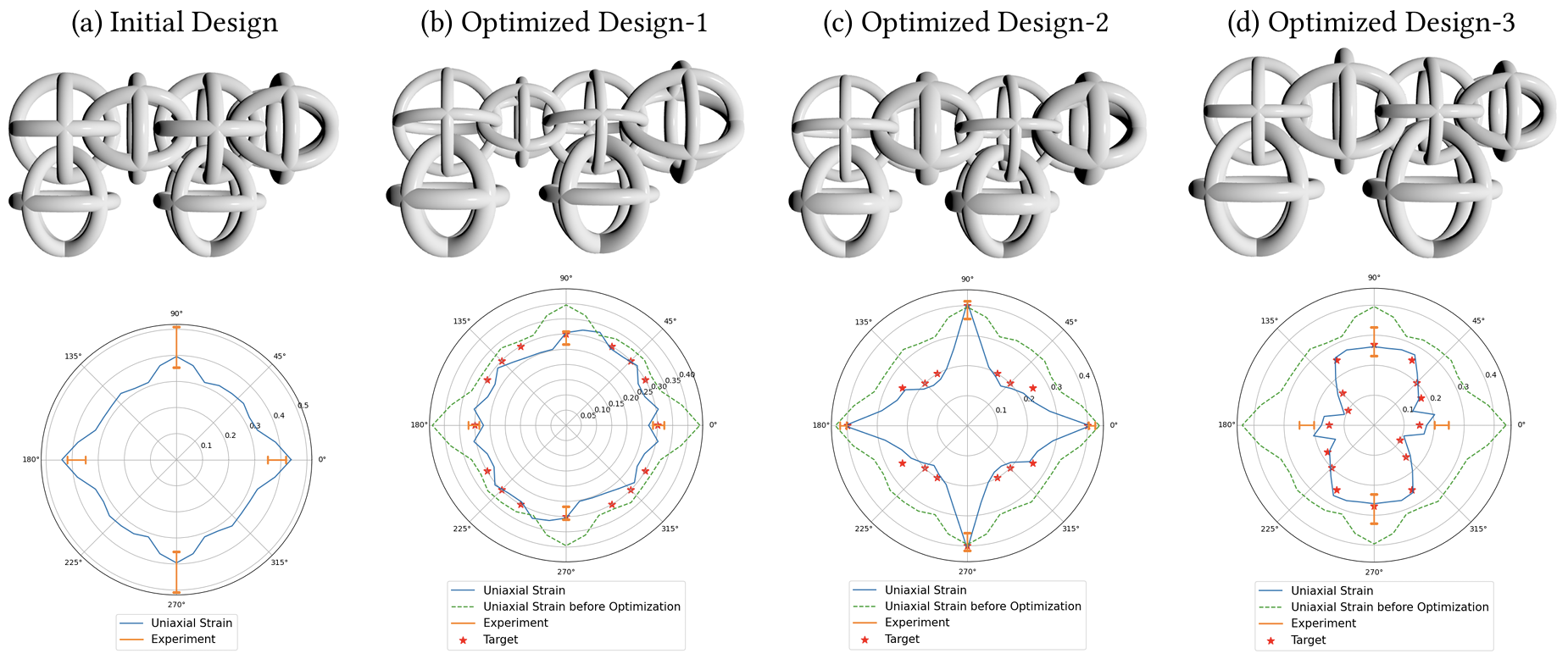
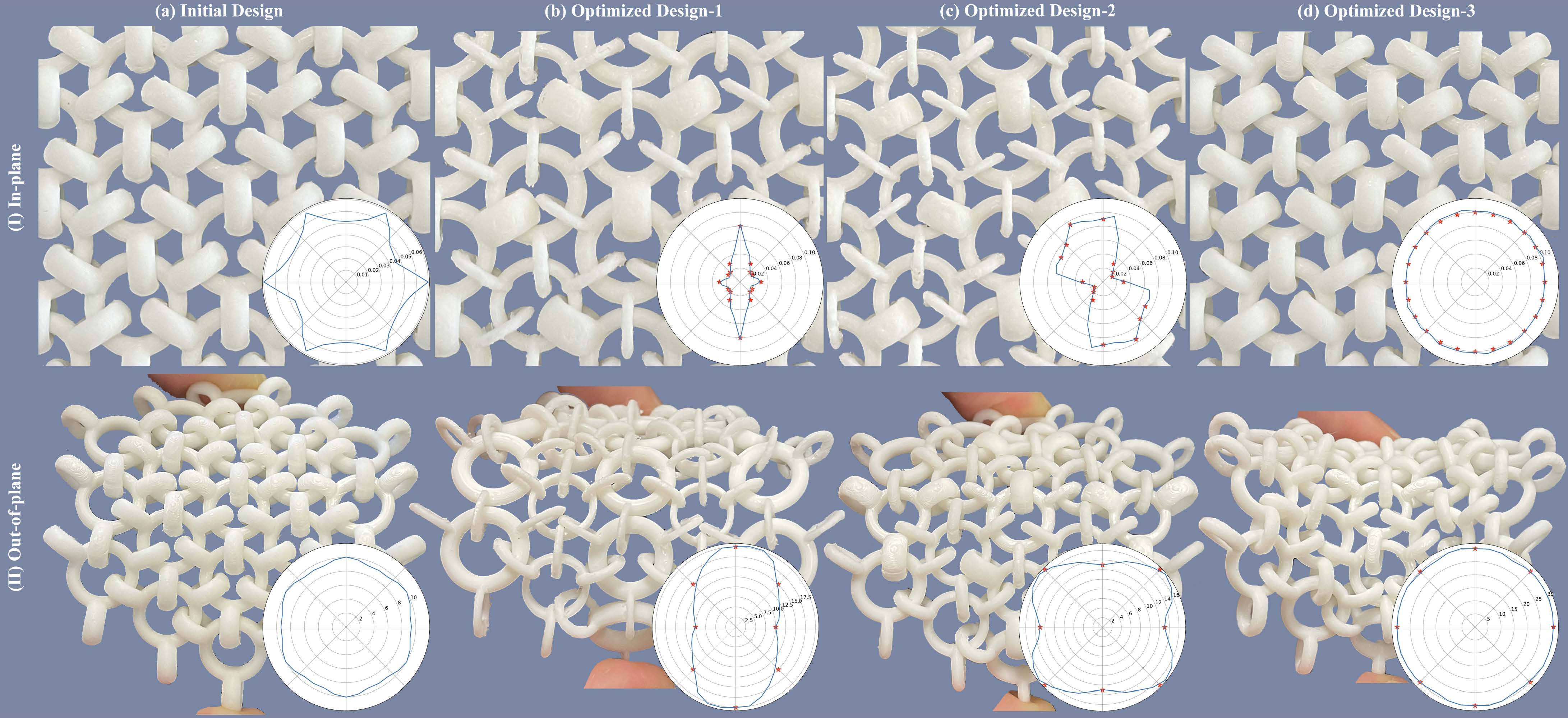
Fig. 7. Fourfold symmetric material.
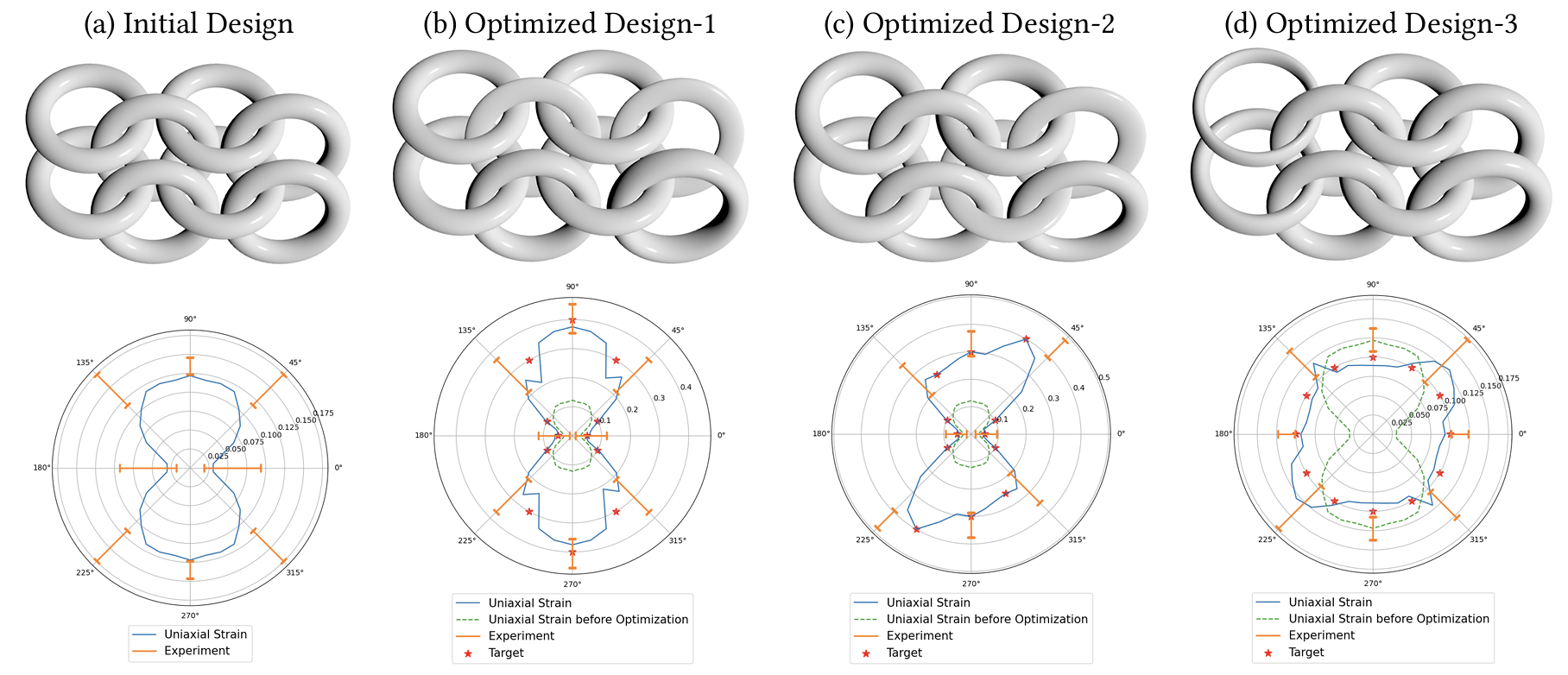
Fig. 8. 4-in-1 chainmail.
Materials
Acknowledgments
The authors thank anonymous reviewers for their valuable feedback. We are also grateful to Rafael Bischof for proofreading the paper. This work was supported by the European Research Council (ERC) under the European Union’s Horizon 2020 research and innovation program (grant agreement No. 866480), and the Swiss National Science Foundation through SNF project grant 200021_200644.